



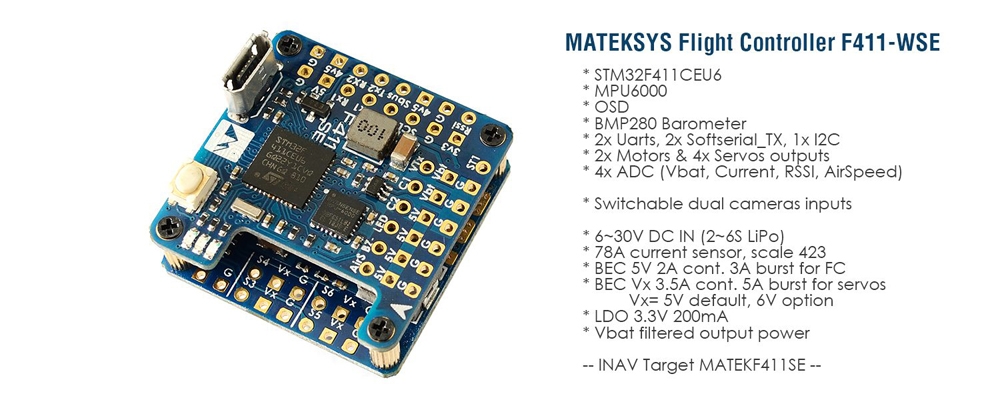
Matek Systems F411-WSE STM32F411CEU6 Flight Controller Built-in OSD for RC Airplane Fixed Wing
FC Firmware
PDB
BEC 5V output
BEC Vx output
BEC 3.3V output
Physical
Description:
Brand name: Matek
Brand name: Matek
MCU: 100MHz STM32F411CEU6
IMU: MPU6000 (SPI)
Baro: BMP280 (I2C)
OSD: AT7456E (SPI)
Blackbox: No
2x Uarts
2x Softserial-Tx
2x Motors, 4x Servos outputs
1x I2C
4x ADC (VBAT, Current, RSSI, AirSpeed)
3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red)
Switchable Dual Camera Inputs
TR/SA VTX control: Yes
WS2812 Led control : Yes
Beeper output: Yes
RSSI: Yes
Voltage devider for Analog Airspeed sensor: Yes
FC Firmware
PDB
Input voltage range: 6~30V (2~6S LiPo)
2x ESC power pads
Battery Voltage Sensor: 1:10 (Scale 1100)
Current Senor: 78A, 3.3V ADC, Scale 423
BEC 5V output
Designed for Flight controller, Receiver, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed module
Continuous current: 2 Amps, Max.3A(5seconds/minute)
BEC Vx output
Designed for Servos
Voltage adjustable, 5V Default, 6V option
Continuous current: 3.5 Amps, Max.5A(5seconds/minute)
BEC 3.3V output
Designed for Baro / Compass module/OLED and Spektrum RX
Linear Regulator
Continuous current: 200mA
Physical
Mounting: 24 x 24mm, Φ2mm
Dimensions: 28 x 28 x 14 mm
Weight: 8.5g
F722-WING VS F405/F411-WING
Mapping
F722-WING VS F405/F411-WING
| F411-WSE | F722-WING | F405-WING | F411-WING | |
| TARGET | MATEKF411SE | MATEKF722SE | MATEKF405SE | MATEKF411 |
| MCU | 100MHz STM32F411 | 216MHz STM32F722 | 168MHz STM32F405 | 100MHz STM32F411 |
| IMU | MP6000 | MP6000 | MP6000 | MP6000 |
| BARO | BMP280 | BMP280 | BMP280 | BMP280 |
| OSD | AT7456E | AT7456E | AT7456E | AT7456E |
| BlackBox | / | MicroSD | MicroSD | / |
| Firmware | INAV | INAV BetaFlight | INAV ArduPilot | INAV BetaFlight |
| Dual Camera In | Yes | Yes | / | / |
| 5V/9V Switcher | / | Yes | / | / |
| Current Sense | 78A | High precision 132A | 104A | 78A |
| Max.Voltage | 30V(6S) | 36V(8S) | 30V(6S) | 30V(6S) |
| Motors | 2 | 2 | 2 | 2 |
| Servos | 4 | 6 | 7 | 5 |
| UART | 2 | 5 | 6 | 2 |
| Softserial | 2 | 1 | 1 | 1 |
| Uart Inversion | RX2 | All | RX2 | RX1 |
| 5V for FC | 2A | 2A | 2A | 2A |
| 9V for VTX | / | 2A | 2A | / |
| Vx for Servos | 3.5A cont. | 5A | 5A | 3A |
| LDO 3.3V | 200mA | 200mA | 500mA | 200mA |
| Size | 28x28 | 54x36 | 56x36 | 41x28 |
| Weight | 8.5g | 25g | 25g | 12g |
Mapping
| INAV MATEKF411SE | Airplane | Flying Wing | Multi-Rotor |
| S1 | Motor-1 | Motor-1 | Motor-1 |
| S2 | Motor-2 | Motor-2 | Motor-2 |
| S3 | Servo | Servo | Motor-3 |
| S4 | Servo | Servo | Motor-4 |
| S5 | Servo | Servo | Motor-5 |
| S6 | Servo | Servo | Servo |
–
| Magnetometer | I2C (SDA, SCL) | HMC5883 /MAG3110 /QMC5883 /IST8310 | |
| OLED | I2C (SDA, SCL) | 0.96″ 128*64 | |
| AirSpeed Pitot | I2C (SDA, SCL) | Digital Pitot_MS4525 | |
| AirSpeed Pitot | AirS pad | Analog AirSpeed sensor | |
–
| SBUS | Sbus pad | Built-in inverter on UART2-RX | |
| GPS | UART1 (Tx1 Rx1) | Disable MSP on UART1 | |
| Frsky Smartport | ST2 pad | Softserial-TX2 is enabled on TX2 pad by default | |
| VTX control | ST1 pad | Softserial-TX1 is enabled on ST1 pad by default | |
–
| FPort | UART2 (TX2) | Need non-inverted Smartport signal(hacked) | |
| GPS | UART1 (Tx1 Rx1) | Disable MSP on UART1 | |
| VTX control | ST1 pad | Softserial-TX1 is enabled on ST1 pad by default | |
–
| PPM | RX2 Pad | Disable Serial RX on UART2 | |
| GPS | UART1 (Tx1 Rx1) | Disable MSP on UART1 | |
| VTX control | ST1 pad | Softserial-TX1 is enabled on ST1 pad by default | |
–
| CrossFire | UART2 (Tx2 Rx2) | Do not enable any functions on SOFTSERIAL2 | |
| GPS | UART1 (Tx1 Rx1) |
Add Comment | |















